クローラーを動かす
必要なパーツ
| メーカー | 秋月 通販コード | 型番 | 商品名 | 個数 |
|---|---|---|---|---|
| Anker | - | A1263011-9 | Anker PowerCore 10000 (モバイルバッテリー 10000mAh) | 1 |
| 協和ハーモネット | P-02220 | TCW 0.6mm 10m | スズメッキ線(0.6mm 10m) | 1 |
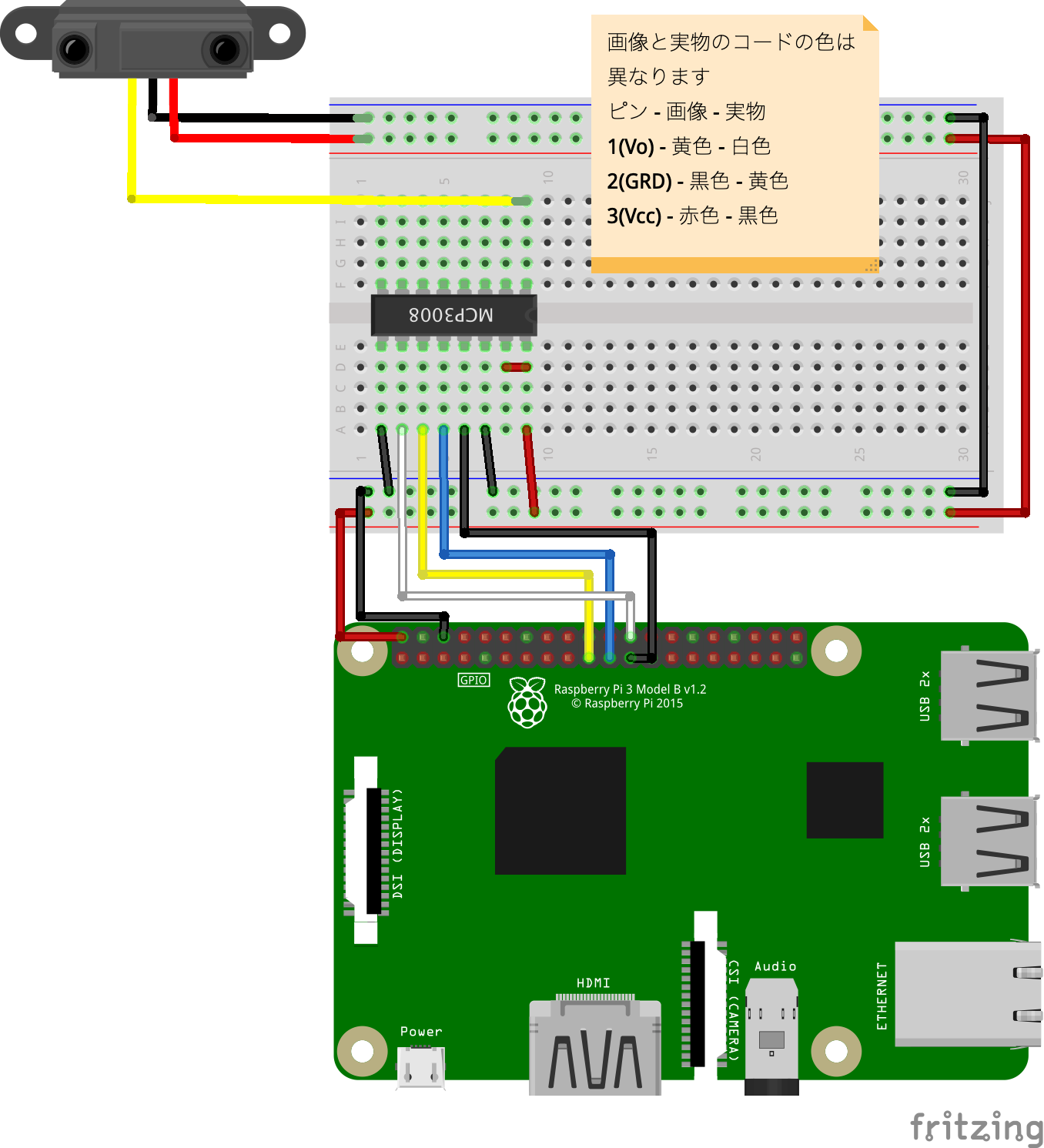
| シャープ | I-02551 | GP2Y0A21YK | シャープ測距モジュール | 1 |
| Microchip Technology Inc. | I-09485 | MCP3008-I/P | 10bit 8ch ADコンバータ | 1 |
| 東芝 | I-02001 | TA7291P | モータードライバ | 2 |
| TAMIYA | - | ITEM 70168 | ダブルギヤボックス | 1 |
| TAMIYA | - | ITEM 70098 | ユニバーサルプレート | 1 |
| TAMIYA | - | ITEM 70229 | 32mm径スプロケット&クローラーセット | 1 |
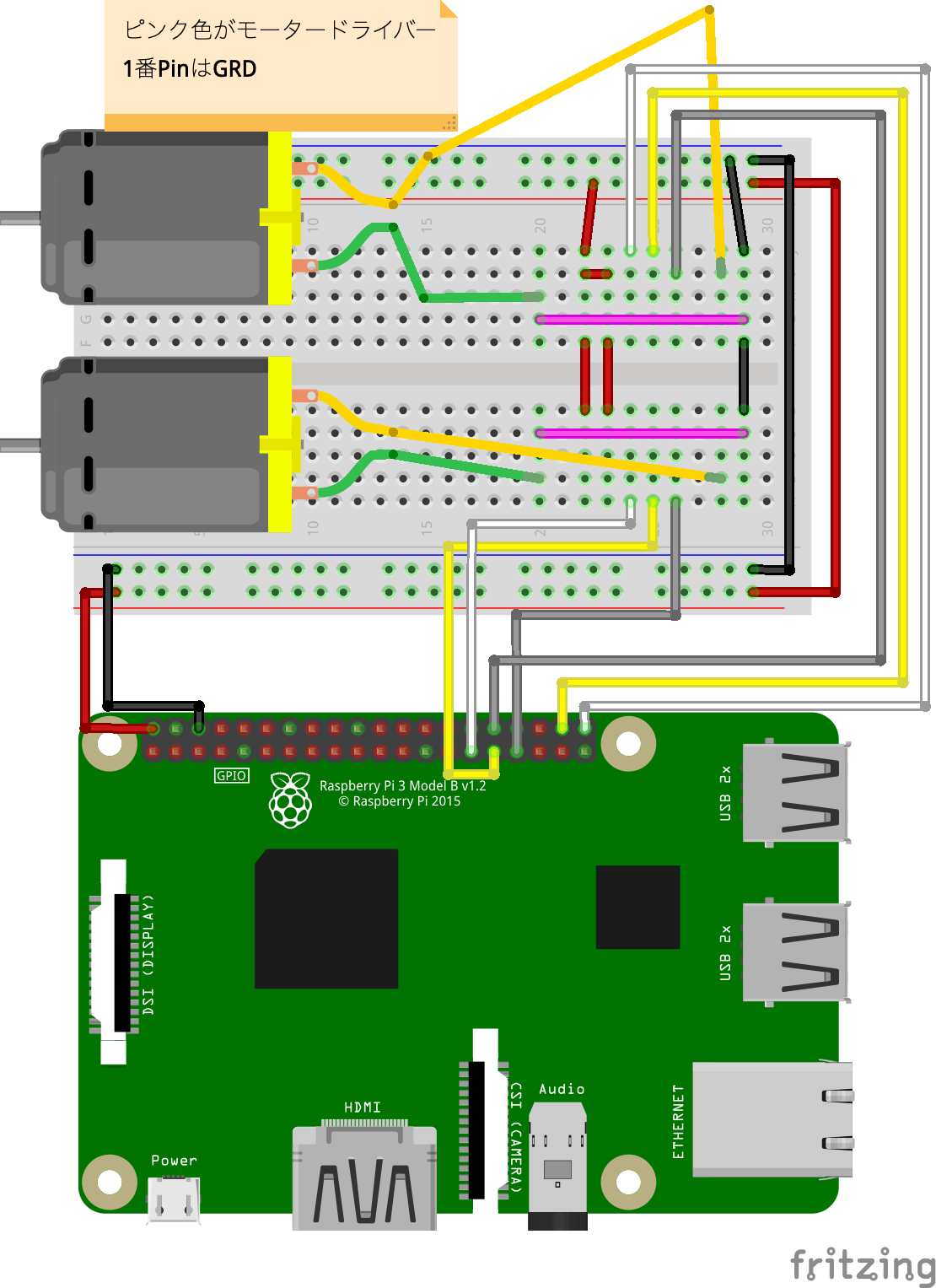
配線
動作確認用のコード
Gemfile
source "https://rubygems.org"
git_source(:github) {|repo_name| "https://github.com/#{repo_name}" }
gem 'pi_piper'
bundle install --path vendor/bundle を実行します。
ta7291p.rb
モータードライバー(TA7291P) を制御するコードです。
require 'pi_piper'
class Ta7291p
attr_reader :forward_pin, :back_pin
def initialize(pwm_pin_id, forward_pin_id, back_pin_id, power_value = 0.5)
@pwm_pin = pwm = PiPiper::Pwm.new pin: pwm_pin_id
@forward_pin = PiPiper::Pin.new pin: forward_pin_id, direction: :out
@back_pin = PiPiper::Pin.new pin: back_pin_id, direction: :out
@power = power_value
@pwm_pin.value = power_value
end
def power=(value)
@power = value
@pwm_pin.value = value
end
def power
@power
end
def forward(drive_time)
@forward_pin.on
sleep drive_time
@forward_pin.off
end
def back(drive_time)
@back_pin.on
sleep drive_time
@back_pin.off
end
def breake
@forward_pin.on
@back_pin.on
end
end
mcp3008.rb
アナログ・デジタル変換チップ(MCP3008) を制御するコードです。
require 'pi_piper'
class Mcp3008
attr_reader :channel
def initialize(channel)
@channel = channel
end
def read
PiPiper::Spi.begin do |spi|
adc = spi.write [0x1, (0x8 + @channel) << 4, 0x0]
((adc[1] & 0x3) << 8) + adc[2]
end
end
end
gp2y0a21yk0f.rb
距離センサー(GP2Y0A21YK0F) から MCP3008 経由で取得した電圧から距離に変換するコードです。
class Gp2y0a21yk0f
def self.volt_to_distance(volt)
return 0 if volt == 0
dist = (6787 / (volt - 3)) - 4
dist.round(4)
end
end
crawler_test.rb
動作確認用のコードです。
require './ta7291p'
require './mcp3008'
require './gp2y0a21yk0f'
# モーター1
# GPIO 20 -> 正転?
# GPIO 21 -> 逆転?
# GPIO 12 -> PWM
@motor_1 = Ta7291p.new(12, 20, 21, 0.7)
# モーター2
# GPIO 5 -> 正転?
# GPIO 6 -> 逆転?
# GPIO 13 -> PWM
@motor_2 = Ta7291p.new(13, 5, 6, 0.7)
# ADコンバーター
mcp3008 = Mcp3008.new(0)
def kick_combo_motor
[@motor_1, @motor_2].map do |motor|
Thread.new { yield(motor) }
end.each { |t| t.join }
end
loop do
# モーターを交互に動かす
@motor_1.forward(2)
@motor_2.forward(2)
sleep 2
# モーターを左右同時に動かす
kick_combo_motor { |motor| motor.forward(2) }
# センサーの値を取得する
puts Gp2y0a21yk0f.volt_to_distance(mcp3008.read)
sleep 2
end
動作確認
これで、モーターが交互に動いた後に、左右のモーターが同時に動きます。 最後に、距離センサーの値をコンソールに表示します。
rbenv sudo bundle exec ruby crawler_test.rb
Let’s try
- 次の機能を備えた、クローラー動かすを作るためにはどのようなアルゴリズムになるか考えてみましょう。
- クローラーは前に進んでいく。
- 距離センサーを使って、障害物がないか確認する。障害物があれば、それを避けて進む。
- 考えたアルゴリズムを実装してみましょう。
回答例はこちら